 STASHI
STASHIJetson Nano Setup

Contents
This is a Quick Start for Jetson Nano.
Board used in this article is Jetson Nano 2GB.
Setup
Overview
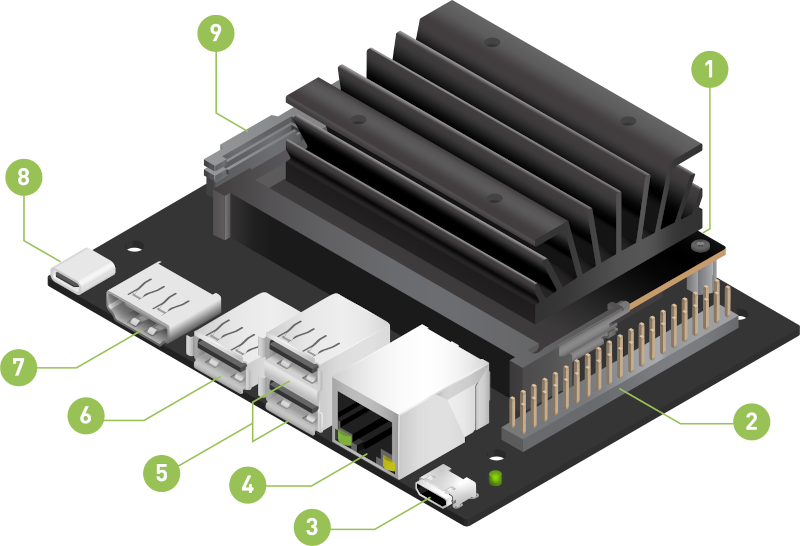
| Ports | |
|---|---|
| ① microSD card slot for main storage | ⑥ USB 3.0 port (x1) |
| ② 40-pin expansion header | ⑦ HDMI output port |
| ③ Micro-USB port for Device Mode | ⑧ USB-C for 5V power input |
| ④ Gigabit Ethernet port | ⑨ MIPI CSI-2 camera connector |
| ⑤ USB 2.0 ports (x2) |
Write Image to microSD Card
-
Write image to microSD with Etcher
First Boot
- Insert the microSD card
- Set the developer kit on a non-conductive surface
- Connect monitor, keyboard, mouse and USB-C power supply (5V⎓3A)
- Boot and setup
Pytorch
PyTorch pip wheels
Will install PyTorch v1.10.0 since the image is embedded with JetPack 4.6.
Installation
-
Install pip3
1sudo apt install python3-pip -
Install Pytorch
1 2 3 4wget https://nvidia.box.com/shared/static/fjtbno0vpo676a25cgvuqc1wty0fkkg6.whl -O torch-1.10.0-cp36-cp36m-linux_aarch64.whl sudo apt-get install python3-pip libopenblas-base libopenmpi-dev pip3 install Cython pip3 install numpy torch-1.10.0-cp36-cp36m-linux_aarch64.whl -
Install torchvision
1 2 3 4 5 6sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev git clone --branch v0.11.1 https://github.com/pytorch/vision torchvision cd torchvision export BUILD_VERSION=0.11.1 python3 setup.py install --user cd ../
Verification
|
|
|
|
Tensorflow
Installation
|
|
Verification
|
|
|
|